Прогулялся я недавно по Луге, а потом и по нескольким посёлкам в Ленинградской области. И в нескольких местах наткнулся примерно на одно и то же зрелище.
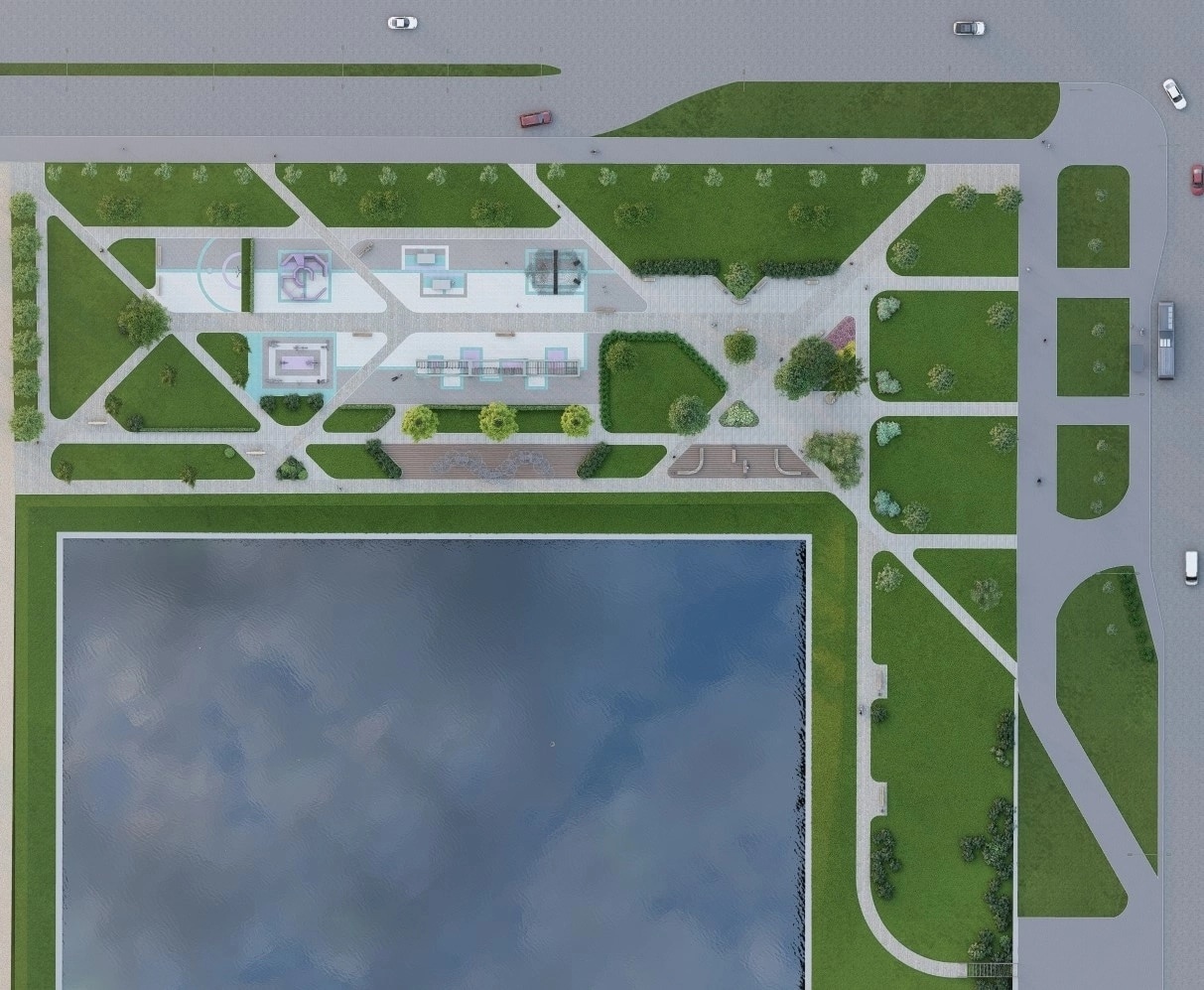
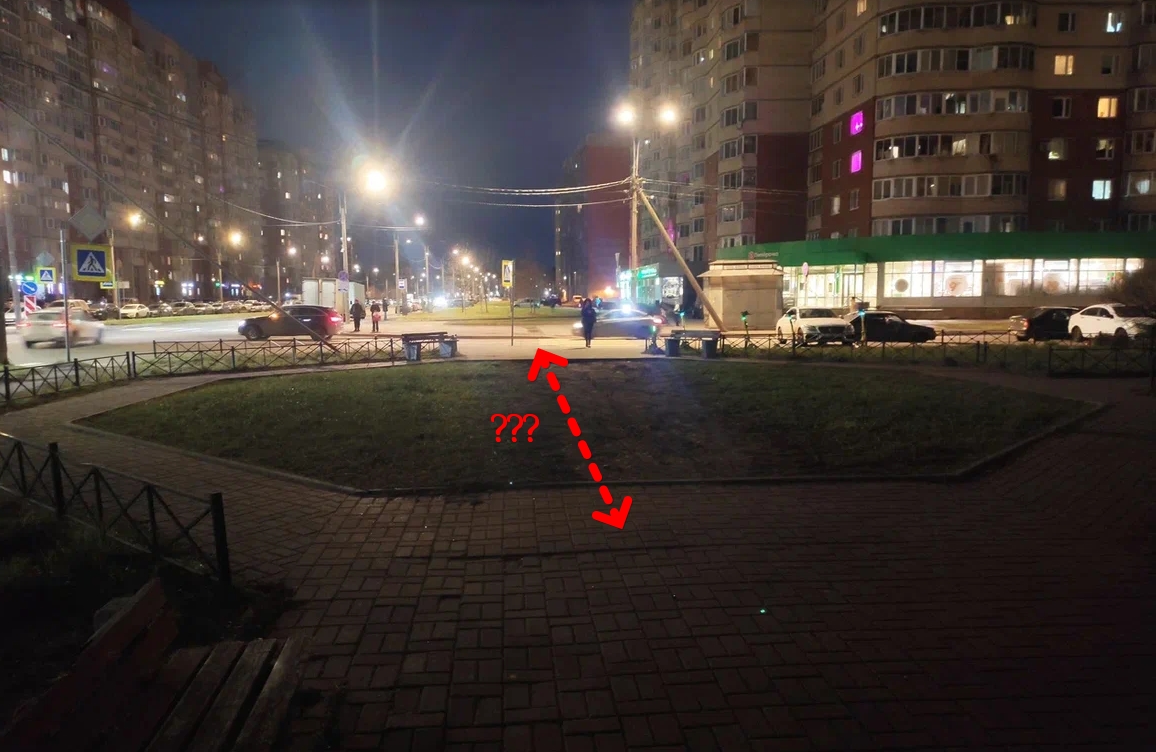
Сквер с новенькой плиткой, через которую уже лезет трава. Лавочки, на которые никто не садится. Фонари, торчащие из заросших газонов. Дорожки, заросшие настолько, что видно — за всё лето по ним прошло человека три, и те явно случайно.

При этом всё это явно построили недавно. Я еще помню, что пару лет назад на этом месте ничего не было. На вид все тоже свежее: плитка целая, краска не облупилась. Но людей нет, и все заросло травой.
Ситуация противоположная той, о которой мы обычно пишем на канале: обычно бывает так, что там где надо было сделать дорожку, никто её не сделал, и пешеходы протоптали свою. А здесь все ровно наоборот — дорожек сделали с запасом, но они никем не используются.
Наверняка вы такое видели и в своем городе. Заросшие скверы, пустые площади, ощущение заброшенности, несмотря на свежий ремонт.
Почему так происходит? Почему иногда общественные пространства оказываются не нужны людям? Давайте разбираться.